Publications
Group highlights
At the end of this page, you can find the full list of publications and patents. All papers are also available on arXiv.

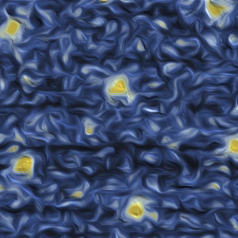
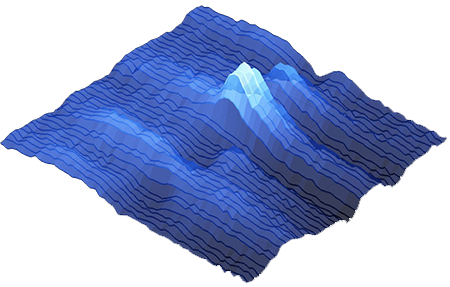
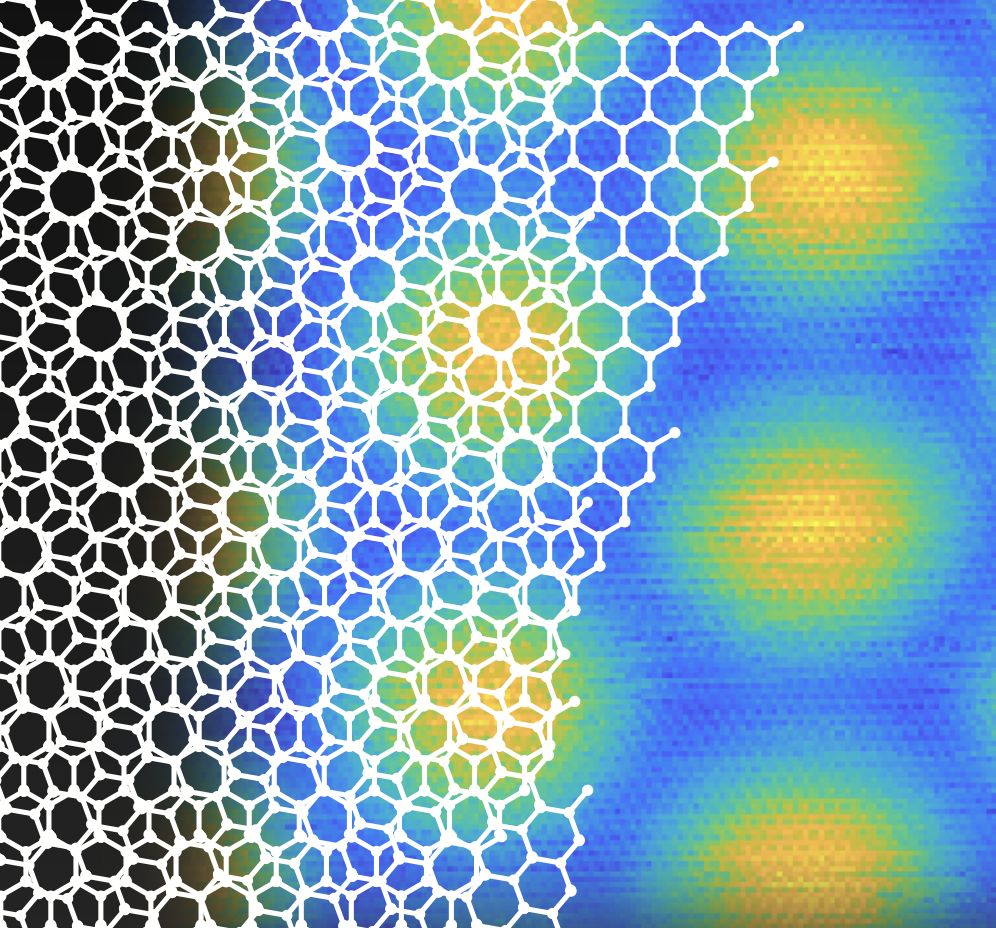
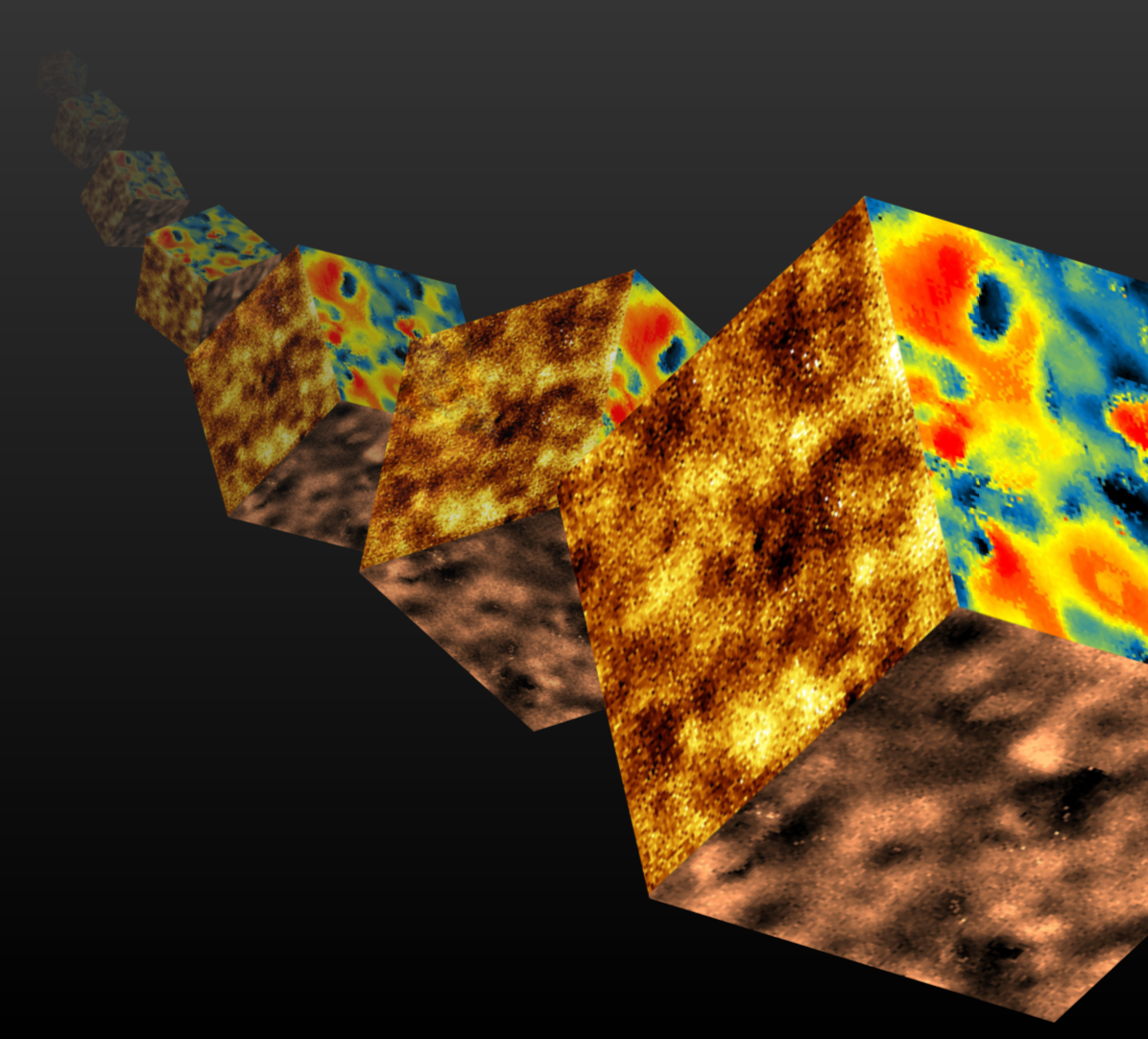
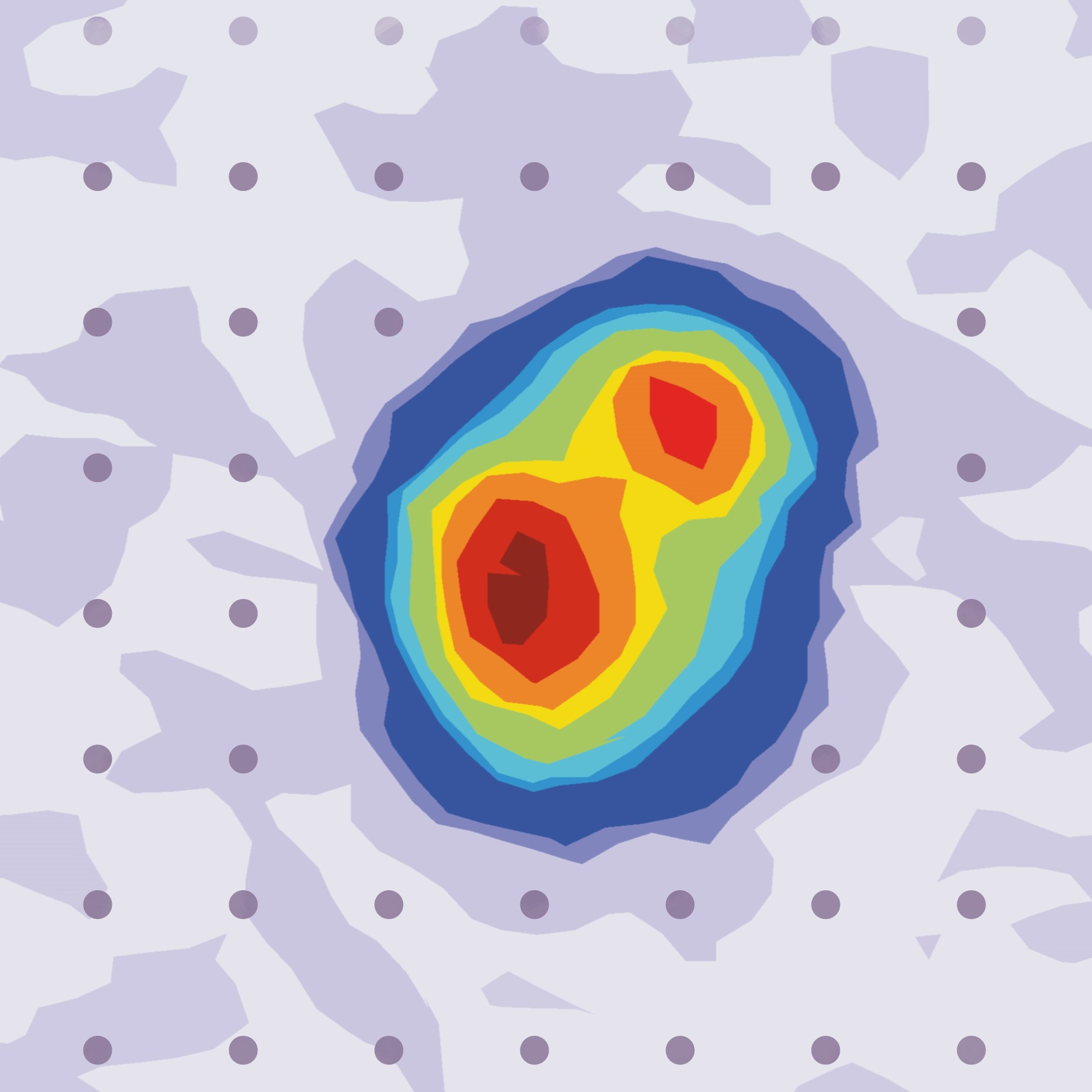
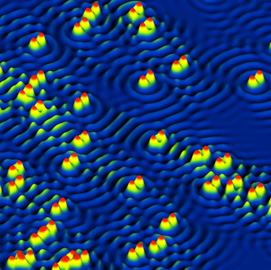
Can superconducting coherence peaks form impurity-like ring patterns? And how can such features appear across the entire surface? We suggest an an amorphous Shiba state located outside the superconducting gap – a Shiba liquid.
Jinwon Lee* & Sanghun Lee*, Andreas Kreisel, Jens Paaske, Brian M. Andersen, Koen M. Bastiaans, Damianos Chatzopoulosm Genda GuDoohee Cho, Milan P. Allan
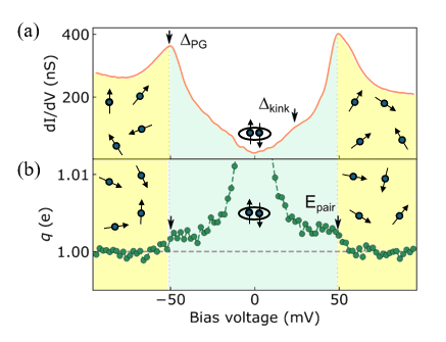
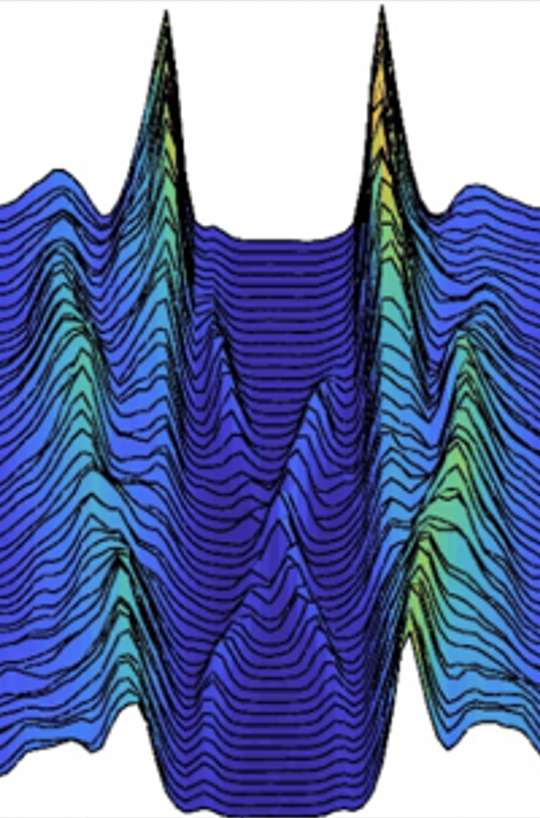
What is the pseudogap and what is the relation between pseudogap and superconductivity? – This is likely the most discussed issue in quantum matter over the last three decades. We report a direct evidence for equivalence of pseudogap and onset energy for electron pairing with our state-of-art electron pair microscope. This may inspire hope for materials with higher Tc.
Jiasen Niu, Maialen Ortego Larrazabal, Thomas Gozlinski, Yudai Sato, Koen M. Bastiaans, Tjerk Benschop, Jian-Feng Ge, Yaroslav M. Blanter, Genda Gu, Ingmar Swart, Milan P. Allan
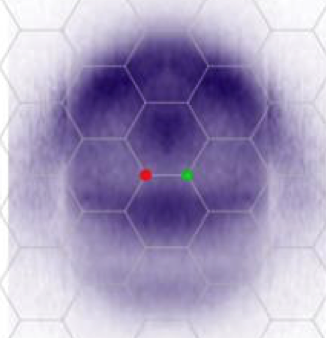
Can mesoscopic shot noise experiments show the doubling of the charge carriers in a superconductor? Turns out, it’s complicated. We investigated this in several different samples, and made predictions as to what is necessary to make this work.
Jiasen Niu, Koen M. Bastiaans, Jianfeng Ge, Ruchi Tomar, John Jesudasan, Pratap Raychaudhuri, Max Karrer, Reinhold Kleiner, Dieter Koelle, Arnaud Barbier, Eduard F.C. Driessen, Yaroslav M. Blanter, Milan P. Allan
Phys. Rev. Lett. 132, 076001 (Editors’ Suggestion)
Shot noise has been suggested for a long time as a tell-tale probe for Majorana bound states. We are the first to carry out local tunneling shot noise measurements on the putative vortex Majorana states.
J-F Ge, KM Bastiaans, D Chatzopoulos, D Cho, WO Tromp, T Benschop, J Niu, G Gu, MP Allan
Nature Communications 4, 3341 (2023)
See news item by Michelle Willebrands
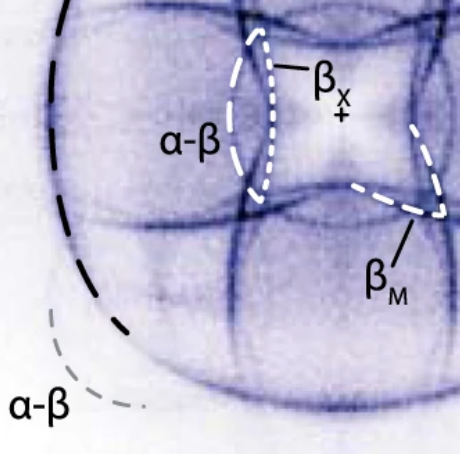
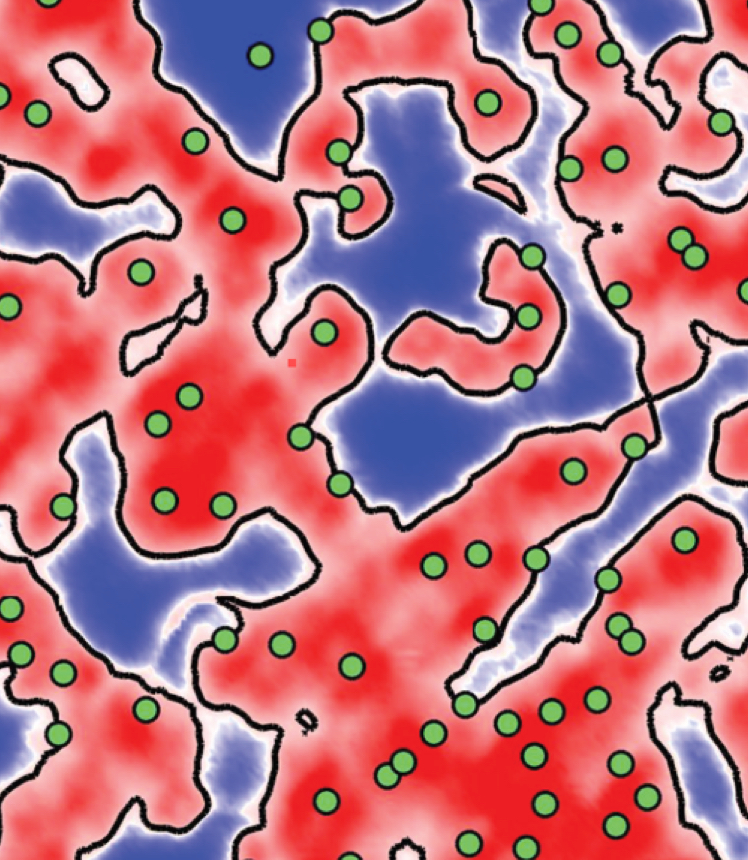
Why does cuprate superconductivity break down at a certain doping level? Using scanning tunneling spectroscopy we find that an emerging metallic matrix inside the superconducting state is responsible for the overall reduction of Tc and the superfluid density, while leaving the gapsize unchanged. The formation of the matrix is tied to a pair breaking process violating a core principle of mean-field theories.
WO Tromp, T Benschop, J-F Ge, I Battisti, KM Bastiaans, D Chatzopoulos, A Vervloet, S Smit, E van Heumen, MS Golden, Y Huang, T Kondo, Y Yin, JE Hoffman, MA Sulangi, J Zaanen, MP Allan
Nature Materials 22, 703 (2023)
See News and Views by Yu He.

We use our atomic-scale scanning tunneling noise setup on a disordered superconductor, and discover a state above TC that, much like an ordinary metal, has no (pseudo)gap, but carries charge via paired electrons.
KM Bastiaans, D Chatzopoulos, J-F Ge, D Cho, WO Tromp, JM van Ruitenbeek, MH Fischer, PJ de Visser, DJ Thoen, EFC Driessen, TM Klapwijk, MP Allan
Featured as ‘Research Highlight’ in Nature Physics by David Abergel
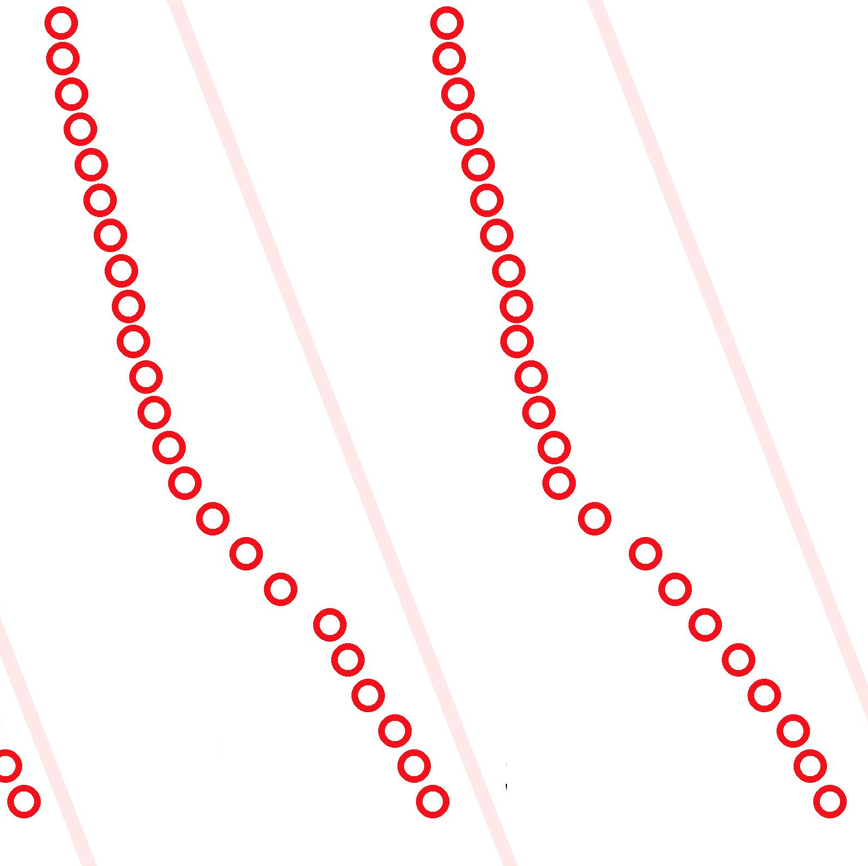
Why is there so much variation in TBG devices? And are open devices more disordered than encapsulated ones? We introduce a new method to continuously map inhomogeneities of a moiré lattice and apply it to open-device TBG to show that twist angle variation is small over areas of hundreds of nm.
T Benschop , TA de Jong, P Stepanov*, Xiaobo Lu, V Stalman, SJ van der Molen, DK Efetov, MP Allan
Phys. Rev. Research 3, 013153 (2021)
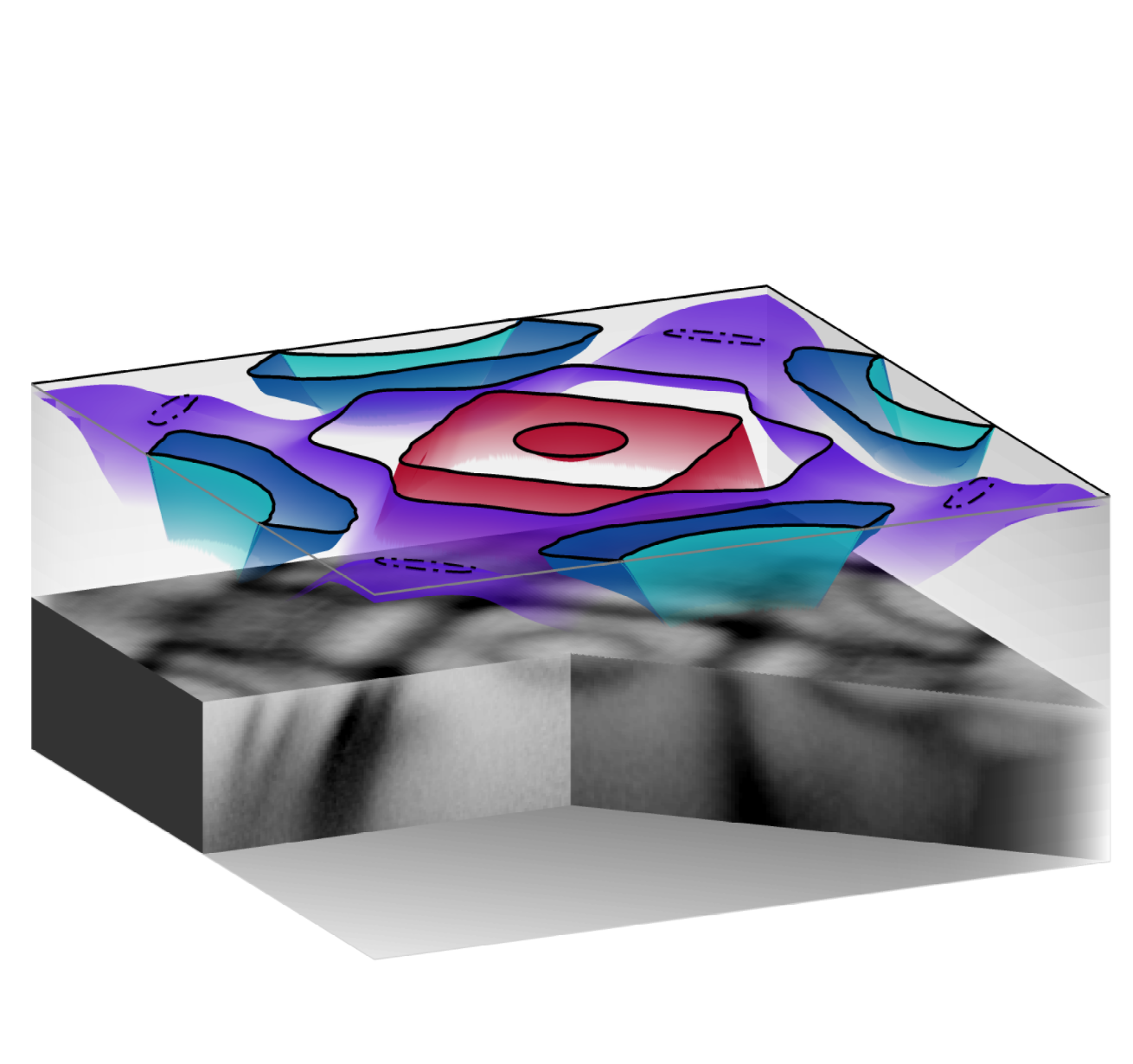
We report on a peculiar, spatially dispersing YSR state in Fe(Se,Te) that can be tuned by the tip.
D Chatzopoulos, Doohee Cho, KM Bastiaans, GO Steffensen, D Bouwmeester, A Akbari, Genda Gu, J Paaske, BM Andersen, MP Allan
Nature Communications 12, 298 (2021)
A first paper from the TBG collaboration is online, with beautiful data from the Baumberger group in Geneva, and great devices from the Efetov group at ICFO. We measured STM on the device.
S Lisi, X Lu, T Benschop, TA de Jong, Petr S, JR Duran, F Margot, I Cucchi, E Cappelli, A Hunter, A Tamai, V Kandyba, A Giampietri, A Barinov, J Jobst, V Stalman, M Leeuwenhoek, K Watanabe, T Taniguchi, L Rademaker, SJ van der Molen, MP Allan, DK Efetov, F Baumberger
News coverage by NRC
We directly test the consistency of results from these three techniques by comparing data from the correlated metal Sr2RhO4. Using ARPES, STM, and quantum oscillations, we find good agreement for the Fermi surface topography and carrier effective masses. Hence, the apparent absence of such an agreement in other quantum materials, including the cuprates, suggests that the electronic states in these materials are of different, non-Fermi liquid-like nature. Collaboration with the groups of Baumberger, Perry, and Mackenzie.
I Battisti, WO Tromp, S Riccò, RS Perry, AP Mackenzie, A Tamai, F Baumberger, MP Allan
npj Quantum Materials 5, 91 (2020)
We succeeded in measuring the superfluid density with atomic resolution on an unconventional superconductor! In contrast to expectations for conventional superconductors, we find that the superfluid densisty is strongly inhomogeneous in FeTe0.55Se0.45.
D Cho* & KM Bastiaans* & D Chatzopoulos*, GD Gu, MP Allan
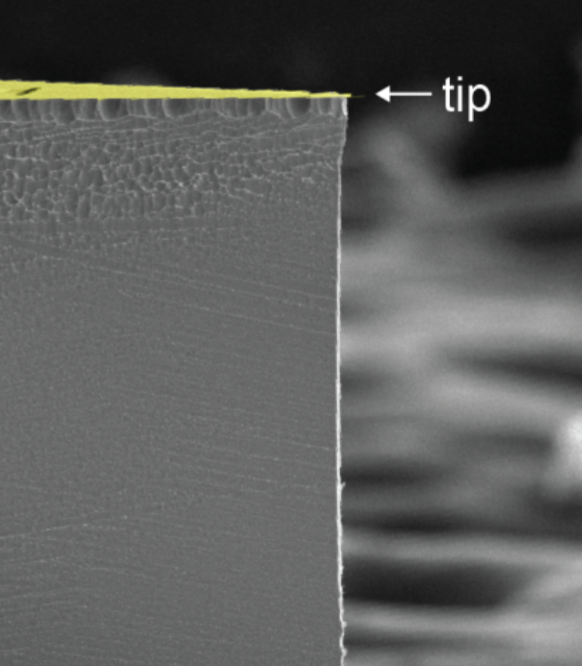
We introduce a platform for bringing new, device-based functionality to STM, with the goal of utilizing decades of progress in device engineering for the field of scanning probe.
M Leeuwenhoek, RA Norte, KM Bastiaans, Doohee Cho, I Battisti, YaM Blanter, S Gröblacher, MP Allan
Nanotechnology 30, 335702 (2019)
See also our papers on the theoretical modeling of such measurements, and the paper about fabrication.
We have imaged the doubling of the current noise due to Andreev reflections in a Josephson scanning tunneling microscope.
KM Bastiaans, D Cho, D Chatzopoulos, M Leeuwenhoek, C Koks, MP Allan
Phys. Rev. B 100, 104506 (2019)
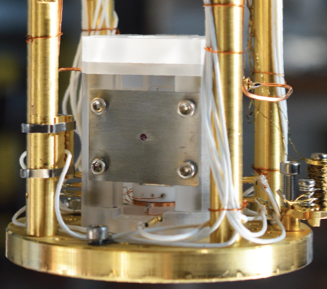
Our first completely home-built STM is alive! And it has the world’s highest resonance frequency.
I Battisti, G Verdoes, K van Oosten, KM Bastiaans, and MP Allan
Rev. Sci. Instrum. 89, 123705 (2018)
Using our newly developed noise-spectroscopy technique we discover charge trapping in a cuprate high-temperature superconductor.
KM Bastiaans* & D Cho*, T Benschop, I Battisti, Y Huang, MS Golden, Q Dong, Y Jin, J Zaanen, MP Allan
Nature Physics 14, 1183 (2018)
Instrument details in Rev. Sci. Instrum. 89, 093709 (2018)
See also quantum universe (in dutch), Phys.org , Leiden University news, UvA news.

We propose an approach to transform a ‘pristine’ material into a better (meta-) superconductor by making use of modern fabrication techniques – designing and engineering the electronic properties of thin films via periodic patterning on the nanoscale.
MP Allan, MH Fischer, O Ostojic, A Andringa
We discover of electronic order, pseudo gap phase separation and an impurity-band Mott transition in an iridate compound, cuprate-style. Along the way, we gained unique knowledge on how a Mott state collapses.
I. Battisti* & K.M. Bastiaans*, V. Fedoseev, A. de la Torre, N. Iliopoulos, A. Tamai, E.C. Hunter, R.S. Perry, J. Zaanen, F. Baumberger, M.P. Allan
See also Leiden University news by Erik Arends, Phys.org
Both the density of states and the QPI dispersion of LiFeAs shows signatures of electron-boson coupling. Comparing these with fingerprints of different boson couplings to conclude that these signatures stem from AF spin fluctuations.
MP Allan* & Kyungmin Lee* & AW Rost*, MH Fischer, F Massee, K Kihou, C-H Lee, A Iyo, H Eisaki, T-M Chuang, AP Mackenzie, JC Davis, DJ Scalapino, E-A Kim
See also Cornell Chronicle by Anne Ju, Phys.org
The heavy Fermion superconductor CeCoIn5 has a d-wave gap with nodes along the (1,1) direction, as we find using QPI.
MP Allan* & F Massee*, DK Morr, J van Dyke, AW Rost, AP Mackenzie, C Petrovic, JC Davis
Featured in ‘News and Views’ by L Taillefer
See also Phys.org, DoE headliner
Using APRES, we find that the bands in Sr3Ru2O7 look more like in heavy fermion material than in a normal metal. We present a detailed investigation into the formation of this particular electronic structure.
MP Allan, A Tamai, E Rozbicki, MH Fischer, J Voss, PDC King, W Meevasana, S Thirupathaiah, E Rienks, J Fink, A Tennant, RS Perry, JF Mercure, MA Wang, J Lee, CJ Fennie, E-A Kim, MJ Lawler, KM Shen, AP Mackenzie, Z-X Shen, F Baumberger
New Journal of Physics 15, 063029 (2013)
We elucidate on the formation of the electronic nematic state in Co-CaFe2As2, finding that the Cobalt dopant atoms play a key role.
MP Allan, T-M Chuang, F Massee, Y Xie, N Ni, SL Bud’ko, GS Boebinger, Q Wang, DS Dessau, PC Canfield, MS Golden, JC Davis
See also Tech Connect by Jennifer Rocha, Phys.org by Bill Steele
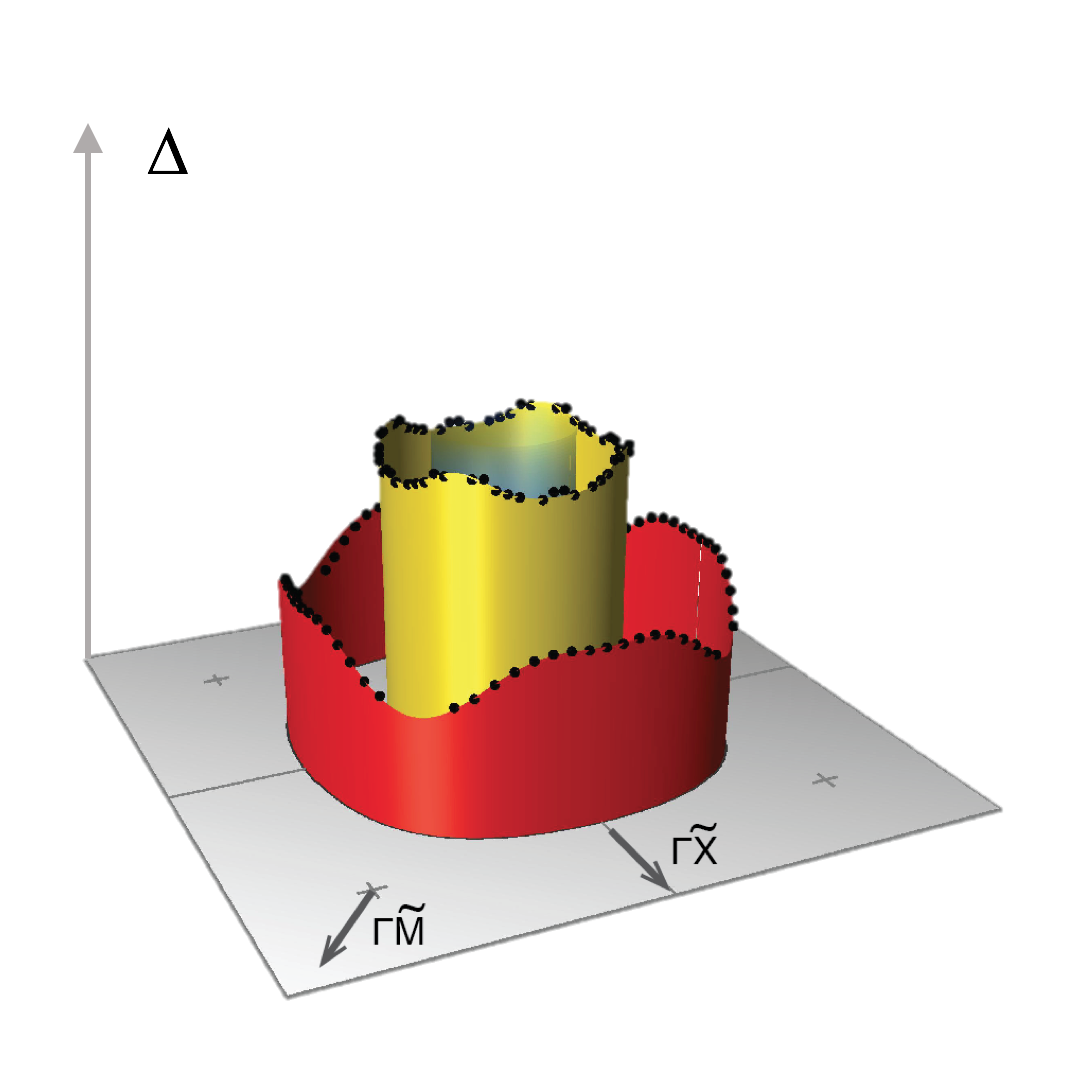
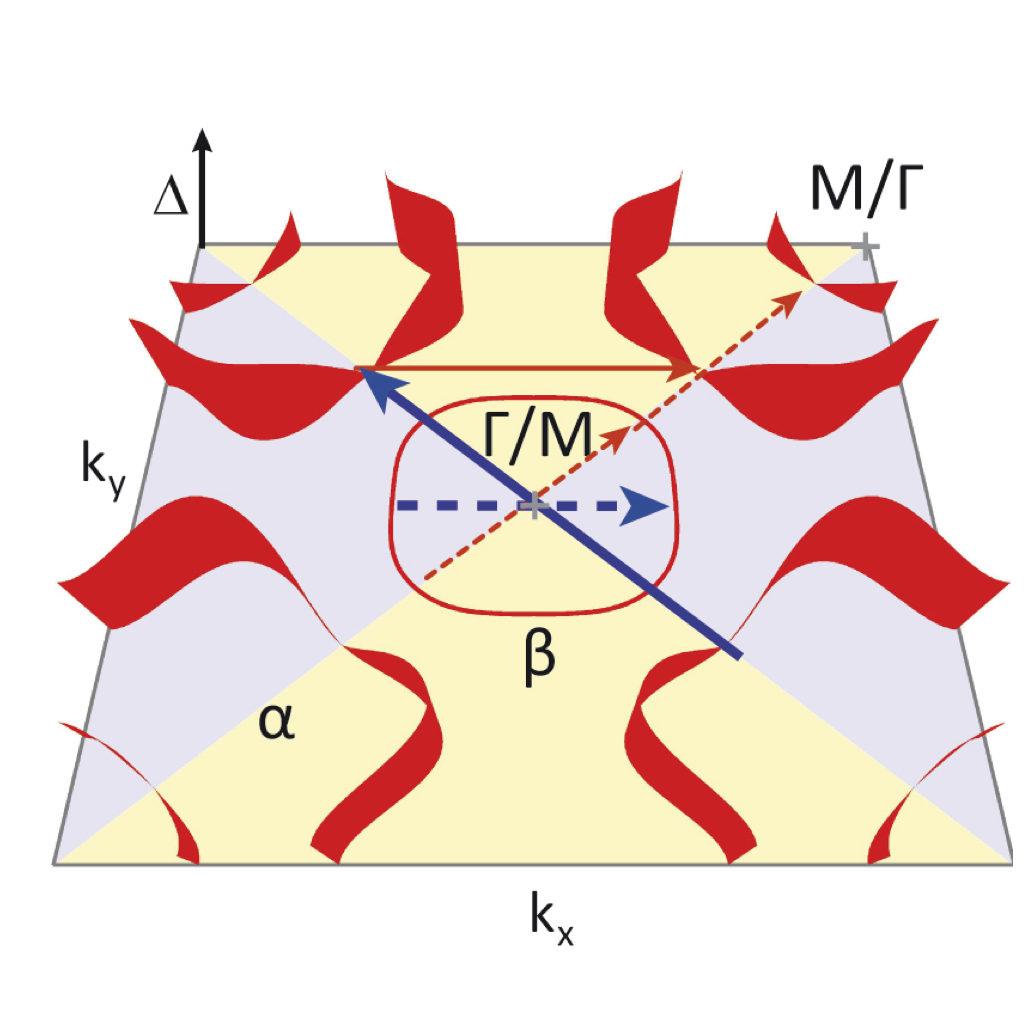
In contrast to earlier photoemission reports, we show that the gaps in iron based superconductors are not isotropic but modulated with angle.
MP Allan⋆ & AW Rost⋆, AP Mackenzie, Y Xie, JC Davis, K Kihou, CH Lee, A Iyo, H Eisaki, T-M Chuang
See also Cornell Cornincle by Bill Steele, Eureka Alert
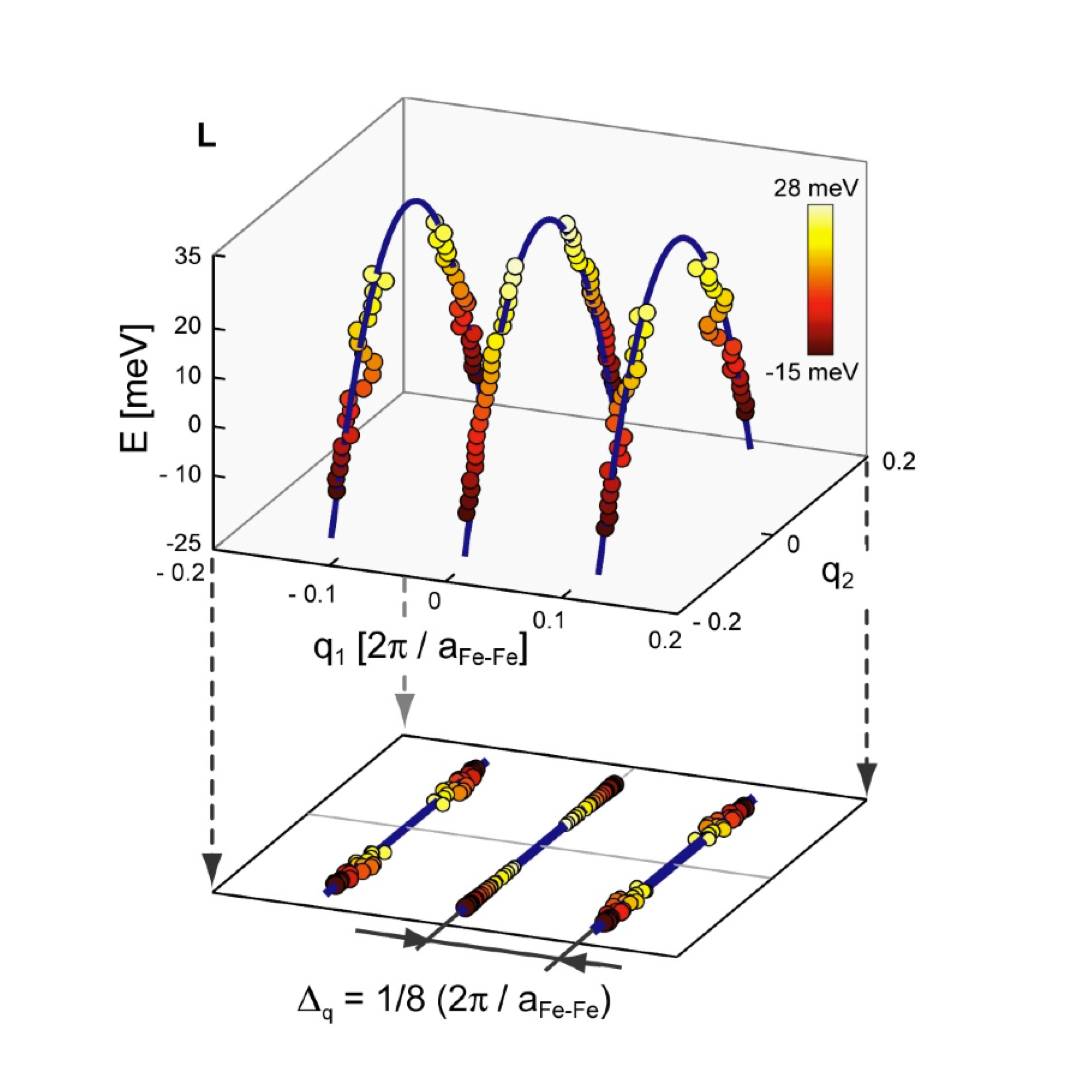
We discovered an electronic nematic in the iron based superconductor Co-CaFe2As2! This state is by now confirmed and quite well characterized by transport, photoemission, and more SI-STM experiments.
T-M Chuang* & MP Allan*, J Lee, Y Xie, N Ni, SL Bud’ko, GS Boebinger PC Canfield, JC Davis
Featured in a ‘Perspective’ by E Fradkin & SA Kivelson
See also Article on NewScientist by Colin Barras
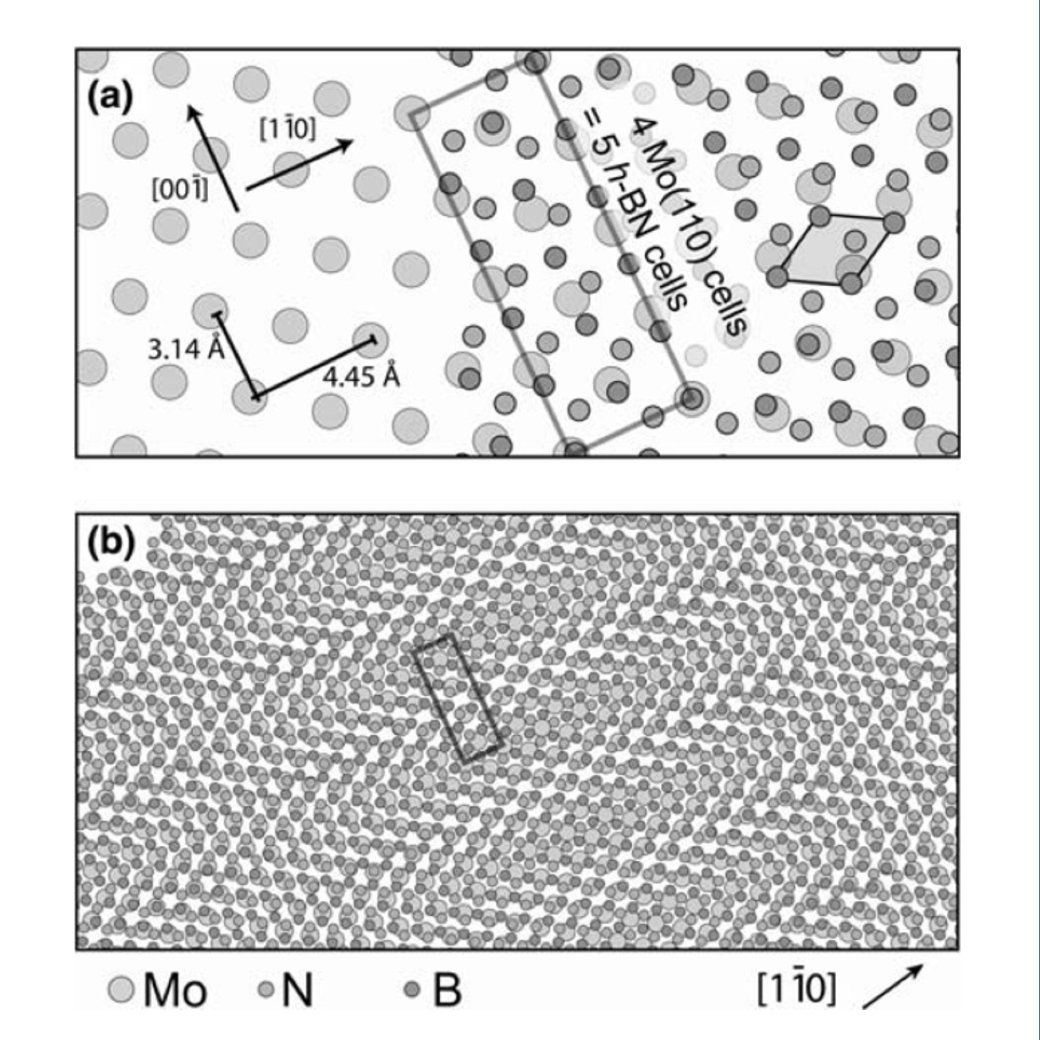
Hexagonal boron nitride shows fancy superstructures on the Mo(111) surface.
MP Allan, S Berner, M Corso, T Greber, J Osterwalder
Nanoscale Research Letters 2, 94 (2007)
Patents
Milan P Allan, S Gröblacher, RA Norte, M Leeuwenhoek
Novel atomic force microscopy probes with phononic crystals
PCT/NL20-20/050797 (2020)
Milan P Allan
Methods of manufacturing superconductor and phononic elements
US10439125B2 (2016)
Full List of publications
Signatures of Amorphous Shiba State in FeTe0.55Se0.45
Jinwon Lee* & Sanghun Lee*, Andreas Kreisel, Jens Paaske, Brian M. Andersen, Koen M. Bastiaans, Damianos Chatzopoulosm Genda GuDoohee Cho, Milan P. Allan
Nano Lett. 25, 4227 (2025)
Equivalence of pseudogap and pairing energy in a cuprate high-temperature superconductor
Jiasen Niu, Maialen Ortego Larrazabal, Thomas Gozlinski, Yudai Sato, Koen M. Bastiaans, Tjerk Benschop, Jian-Feng Ge, Yaroslav M. Blanter, Genda Gu, Ingmar Swart, Milan P. Allan
arXiv
Why shot noise does not generally detect pairing in mesoscopic superconducting tunnel junctions
Jiasen Niu, Koen M. Bastiaans, Jianfeng Ge, Ruchi Tomar, John Jesudasan, Pratap Raychaudhuri, Max Karrer, Reinhold Kleiner, Dieter Koelle, Arnaud Barbier, Eduard F.C. Driessen, Yaroslav M. Blanter, Milan P. Allan
Phys. Rev. Lett. 132, 076001 (Editors’ Suggestion)
Single-electron charge transfer into putative Majorana and trivial modes in individual vortices
J-F Ge, KM Bastiaans, D Chatzopoulos, D Cho, WO Tromp, T Benschop, J Niu, G Gu, MP Allan
Nature Communications 4, 3341 (2023)
Puddle formation, persistent gaps, and non-mean-field breakdown of superconductivity in overdoped (Pb,Bi)2Sr2CuO6+δ
WO Tromp, T Benschop, J-F Ge, I Battisti, KM Bastiaans, D Chatzopoulos, A Vervloet, S Smit, E van Heumen, MS Golden, Y Huang, T Kondo, Y Yin, JE Hoffman, MA Sulangi, J Zaanen, MP Allan
Nature Materials 22, 703 (2023)
Direct evidence for Cooper pairing without a spectral gap in a disordered superconductor above Tc
KM Bastiaans, D Chatzopoulos, J-F Ge, D Cho, WO Tromp, JM van Ruitenbeek, MH Fischer, PJ de Visser, DJ Thoen, EFC Driessen, TM Klapwijk, MP Allan
Science 374, 608 (2021)
Imaging moiré deformation and dynamics in twisted bilayer graphene
TA de Jong, T Benschop, X Chen, EE Krasovskii, MJA de Dood, RM Tromp, MP Allan, SJ van der Molen
Nat Comm 13, 70 (2022)
Measuring local moiré lattice heterogeneity of twisted bilayer graphene
T Benschop , TA de Jong, P Stepanov*, Xiaobo Lu, V Stalman, SJ van der Molen, DK Efetov, MP Allan
Phys. Rev. Research 3, 013153 (2021)
Spatially dispersing Yu-Shiba-Rusinov states in the unconventional superconductor FeTe0.55Se0.45
D Chatzopoulos, Doohee Cho, KM Bastiaans, GO Steffensen, D Bouwmeester, A Akbari, Genda Gu, J Paaske, BM Andersen, MP Allan
Nature Communications 12, 298 (2021)
Multi-Atom Quasiparticle Scattering Interference for Superconductor Energy-Gap Symmetry Determination
R Sharma, A Kreisel, MA Sulangi, J Böker, A Kostin, MP Allan, H Eisaki, AE Böhmer, PC Canfield, I Eremin, JC Davis, PJ Hirschfeld, PO Sprau
npj Quantum Materials 6, 7 (2021)
Observation of flat bands in twisted bilayer graphene
S Lisi, X Lu, T Benschop, TA de Jong, Petr S, JR Duran, F Margot, I Cucchi, E Cappelli, A Hunter, A Tamai, V Kandyba, A Giampietri, A Barinov, J Jobst, V Stalman, M Leeuwenhoek, K Watanabe, T Taniguchi, L Rademaker, SJ van der Molen, MP Allan, DK Efetov, F Baumberger
Nature Physics 17, 198 (2020)
Direct comparison of ARPES, STM, and quantum oscillation data for band structure determination in Sr2RhO4
I Battisti, WO Tromp, S Riccò, RS Perry, AP Mackenzie, A Tamai, F Baumberger, MP Allan
npj Quantum Materials 5, 91 (2020)
Fabrication of on-chip probes for double-tip scanning tunneling microscopy
M Leeuwenhoek, F Groenewoud, K van Oosten, T Benschop, MP Allan, S Gröblacher
Microsyst. Nanoeng. 6, 99 (2020)
Modeling Green’s functions measurements with two-tip scanning tunneling microscopy
M Leeuwenhoek, S Gröblacher, MP Allan, YaM Blanter
PRB 102, 115416 (2020)
A strongly inhomogeneous superfluid in an iron-based superconductor
D Cho* & KM Bastiaans* & D Chatzopoulos*, GD Gu, MP Allan
Nature 571, 541 (2019)
Nanofabricated tips as a platform for double-tip and device based scanning tunneling microscopy
M Leeuwenhoek, RA Norte, KM Bastiaans, Doohee Cho, I Battisti, YaM Blanter, S Gröblacher, MP Allan
Nanotechnology 30, 335702 (2019)
Imaging doubled shot noise in a Josephson scanning tunneling microscope
KM Bastiaans, D Cho, D Chatzopoulos, M Leeuwenhoek, C Koks, MP Allan
Phys. Rev. B 100, 104506 (2019)
Definition of design guidelines, construction and performance of an ultra-stable scanning tunneling microscope for spectroscopic imaging
I Battisti, G Verdoes, K van Oosten, KM Bastiaans, and MP Allan
Rev. Sci. Instrum. 89, 123705 (2018)
Charge trapping and super-Poissonian noise centres in a cuprate superconductor
KM Bastiaans* & D Cho*, T Benschop, I Battisti, Y Huang, MS Golden, Q Dong, Y Jin, J Zaanen, MP Allan
Nature Physics 14, 1183 (2018)
Amplifier for scanning tunneling microscopy at MHz frequencies
KM Bastiaans, T Benschop, D Chatzopoulos, D Cho, Q Dong, Y Jin, MP Allan
Rev. Sci. Instrum. 89, 093709 (2018)
Revisiting quasiparticle scattering interference in high-temperature superconductors: the problem of narrow peaks
MA Sulangi, MP Allan, J Zaanen
PRB 96, 134507 (2017)
Robust procedure for creating and characterizing the atomic structure of scanning tunneling microscope tips
S Tewari, KM Bastiaans, MP Allan, JM van Ruitenbeek
Beilstein J. Nanotechnol. 8, 2389 (2017)
Creating better superconductors by periodic nanopatterning
MP Allan, MH Fischer, O Ostojic, A Andringa
SciPost Phys. 3, 010 (2017)
Poor electronic screening in lightly doped Mott insulators observed with scanning tunneling microscopy
I Battisti, V Fedoseev, KM Bastiaans, A de la Torre, RS Perry, F Baumberger, MP Allan
Phys. Rev. B 95, 235141, Editors’ suggestion (2017)
Universality of pseudo gap and emergent order in lightly doped Mott insulators
I. Battisti* & K.M. Bastiaans*, V. Fedoseev, A. de la Torre, N. Iliopoulos, A. Tamai, E.C. Hunter, R.S. Perry, J. Zaanen, F. Baumberger, M.P. Allan
Nature Physics 13, 21 (2017)
Identifying the fingerprint of antiferromagnetic spin fluctuations in iron pnictide superconductors
MP Allan* & Kyungmin Lee* & AW Rost*, MH Fischer, F Massee, K Kihou, C-H Lee, A Iyo, H Eisaki, T-M Chuang, AP Mackenzie, JC Davis, DJ Scalapino, E-A Kim
Nature Physics 11, 177 (2015)
Direct evidence for a magnetic f-electron mediated Cooper pairing mechanism of heavy fermion superconductivity in CeCoIn5
J Van Dyke, F Massee, MP Allan, JC Davis, C Petrovic, and DK Morr
PNAS 111, 11663 (2014)
Imaging Cooper pairing of heavy fermions in CeCoIn5
MP Allan* & F Massee*, DK Morr, J van Dyke, AW Rost, AP Mackenzie, C Petrovic, JC Davis
Nature Physics 9, 468 (2013)
Formation of heavy d-electron quasiparticles in Sr3Ru2O7
MP Allan, A Tamai, E Rozbicki, MH Fischer, J Voss, PDC King, W Meevasana, S Thirupathaiah, E Rienks, J Fink, A Tennant, RS Perry, JF Mercure, MA Wang, J Lee, CJ Fennie, E-A Kim, MJ Lawler, KM Shen, AP Mackenzie, Z-X Shen, F Baumberger
New Journal of Physics 15, 063029 (2013)
Anisotropic impurity states, quasiparticle scattering and nematic transport in underdoped Ca(Fe1−xCox)2As2
MP Allan, T-M Chuang, F Massee, Y Xie, N Ni, SL Bud’ko, GS Boebinger, Q Wang, DS Dessau, PC Canfield, MS Golden, JC Davis
Nature Physics 9, 220 (2013)
Anisotropic energy gaps of iron-based superconductivity from intraband quasiparticle interference in LiFeAs
MP Allan⋆ & AW Rost⋆, AP Mackenzie, Y Xie, JC Davis, K Kihou, CH Lee, A Iyo, H Eisaki, T-M Chuang
Science 336, 563 (2012)
How Kondo-holes create intense nanoscale heavy-fermion hybridization disorder
MH Hamidian, AR Schmidt, IA Firmo, MP Allan, P Bradley, JD Garrett, TJ Williams, GM Luke, Y Dubi, AV Balatsky, JC Davis
PNAS 108, 18233 (2011)
Nematic electronic structure in the “parent” state of the iron-based superconductor Ca(Fe1−xCox)2As2
T-M Chuang* & MP Allan*, J Lee, Y Xie, N Ni, SL Bud’ko, GS Boebinger PC Canfield, JC Davis
Science 327, 181 (2010)
Heavy d-electron quasiparticle interference and real-space electronic structure of Sr3Ru2O7
Jinho Lee* & M. P. Allan*, M. A.Wang, J. Farrell, S. A. Grigera, F. Baumberger, J. C. Davis and A. P. Mackenzie
Nature Physics 5, 800 (2009)
Fermi surface and van Hove singularities in the itinerant metamagnet Sr3Ru2O7
A Tamai, MP Allan, JF Mercure, W Meevasana, R Dunkel, DH Lu, RS Perry, AP Mackenzie, David J Singh, Z-X Shen, F Baumberger
Phys. Rev. Lett. 101, 026407 (2008)
Tunable self-assembly of one-dimensional nanostructures with orthogonal directions
MP Allan, S Berner, M Corso, T Greber, J Osterwalder
Nanoscale Research Letters 2, 94 (2007)
Photoelectron Diffraction for a Look inside Nanostructures
J Osterwalder, A Tamai, W Auwärter; MP Allan, T Greber
CHIMIA 11, 759 (2006)